
Your Guide to 8 Essential Robot Electric Grippers
Think of a robot arm as a superstar athlete. It’s got the strength, the reach, and the precision. But without the right “hands,” it can’t truly perform. That’s where electric grippers come in – the versatile, intelligent, and increasingly essential tools that turn robotic potential into real-world action. Forget clunky pneumatics; electric grippers offer precise control, cleaner operation, and seamless integration into the smart factories of today.
Let’s dive into the 6 most common types of electric grippers, understand their superpowers, and see where they shine. Plus, we’ll peek at two fascinating bonus technologies: dexterous hands and electric vacuum cups!

1.The Workhorse: Parallel Electric Grippers
The Gist: Imagine a simple, powerful hand opening and closing straight in and out. That’s the parallel gripper in a nutshell. Its two jaws move synchronously along parallel tracks, gripping objects from opposite sides. Simplicity is its core strength.
Key Features:
- Linear Motion: Straight-line opening/closing.
- High Grip Force: Often delivers significant clamping power relative to size.
- Compact & Robust: Simple design means reliability and space efficiency.
- Fast Cycle Times: Excellent for high-speed pick-and-place.
Ideal For: This is the undisputed king of high-volume, repetitive tasks.
- Pick-and-Place: Moving components onto PCBs, placing items in packaging.
- Machine Tending: Loading/unloading CNC machines, injection molders.
- Assembly: Inserting parts, holding components during fastening.
- Packaging: Handling boxes, bottles, blister packs.
Pros: Rugged, reliable, cost-effective, fast, strong grip, easy to program.
Cons: Limited to objects grippable from two parallel sides; less adaptable to irregular shapes without custom jaws.
2.The Twister: Rotary Electric Grippers
The Gist: What if your gripper could not only grab but also twist? Rotary grippers add a rotational axis (typically 90° or 180°) to the gripping motion. They can pick an object in one orientation and place it in another without needing extra robot movements.
Key Features:
- Combined Motion: Gripping jaws close and the entire gripper body rotates.
- Orientation Change: Efficiently flips or reorients parts.
- Space Optimization: Can perform reorientation within the gripper’s footprint.
Ideal For: Tasks requiring part reorientation are its sweet spot.
- Part Flipping: Turning over components for processing on the other side (e.g., machining, inspection).
- Feeding Parts: Presenting parts correctly oriented to the next station.
- Complex Assembly: Inserting parts that need a twist (like screws or connectors).
- Packaging: Rotating items for optimal placement in boxes or trays.
Pros: Saves robot cycle time by combining grip and rotate, simplifies cell layout.
Cons: Generally slower pure gripping speed than parallel grippers, slightly more complex.

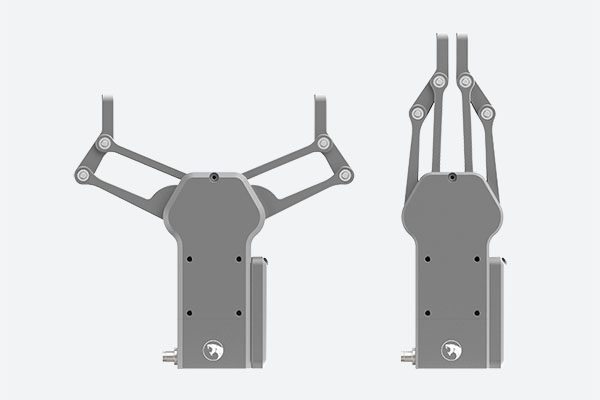
3.The Centering Master: Y-Type (3-Jaw Radial) Electric Grippers
The Gist: Imagine three fingers closing inwards simultaneously towards a central point. This self-centering action is the hallmark of the Y-type (or 3-jaw radial) gripper. It’s inspired by the drill chuck.
Key Features:
- Radial, Synchronized Motion: All three jaws move equally towards/away from the center.
- Automatic Centering: Grips cylindrical or spherical objects perfectly centered.
- Gentle & Secure: Evenly distributes grip force around the object.
Ideal For: Handling round or symmetrical objects is its forte.
- Cylindrical Parts: Bearings, shafts, pipes, bottles, vials, cans.
- Spherical Objects: Balls, knobs, some fruits.
- Hex/Round Fasteners: Nuts, bolts.
- Precision Handling: Where centered gripping is critical (e.g., optical components).
Pros: Excellent centering, gentle on parts, secure hold on round objects.
Cons: Less effective on non-round/square shapes, typically lower grip force than equivalent parallel grippers, larger footprint.
4.The Span Master: Wide Electric Grippers
The Gist: Sometimes you just need to grab something big. Wide grippers (often called large-stroke parallel grippers) prioritize maximum jaw opening distance (“stroke”) over extreme force or compactness.
Key Features:
- Large Stroke: Significantly wider opening than standard parallel grippers.
- Parallel Motion: Maintains parallel jaw movement even at wide openings.
- Adaptable Jaws: Often allows for custom jaw extensions/tooling.
Ideal For: Big, bulky, or variably sized items.
- Large Boxes & Cartons: Warehouse picking, palletizing/depalletizing.
- Appliances: Handling washing machines, microwaves, etc.
- Automotive Parts: Bumpers, dashboards, large panels.
- Furniture & Building Materials.
- Bags & Pouches: Where a wide grip point is needed.
Pros: Handles large or variable-sized objects effectively, versatile with tooling.
Cons: Lower grip force per unit size (force is spread over larger jaws/longer moment arm), potentially slower, larger/heavier.

5.The Safe Partner: Collaborative Electric Grippers
The Gist: Designed specifically to work safely alongside humans in collaborative robot (cobot) applications. Safety is baked into the design.
Key Features:
- Low Inertia & Mass: Lightweight construction minimizes impact force.
- Rounded, Pinch-Free Design: Smooth surfaces, guarded moving parts.
- Force/Torque Limiting: Sensors monitor grip force and can trigger a safe stop if contact is detected.
- Power & Force Limiting (PFL): Complies with safety standards (ISO/TS 15066).
Ideal For: Any application where robots and humans share workspace without traditional safety cages.
- Cobot Assembly: Handing tools or parts to a human assembler.
- Lab Automation: Handling sensitive samples near technicians.
- Packaging & Kitting: Working on a shared table.
- Quality Inspection: Presenting parts to a human inspector.
Pros: Enables safe human-robot collaboration, lightweight, often easy to integrate with cobots.
Cons: Generally lower grip force than industrial counterparts (due to safety constraints), often higher cost due to safety features.

6.The Versatile Grip: 3-Finger Adaptive Electric Grippers
The Gist: Moving beyond simple open/close, these grippers have three independently or semi-independently controlled fingers. They can adapt their grip to a wider range of object shapes and sizes.
Key Features:
- Three Articulated Fingers: Often with one or more joints per finger.
- Adaptive Grasping: Finger positions adjust to conform to object contours.
- Multiple Grasp Modes: Can perform pinch grasps (like tweezers), wrap grasps (like a hand), and sometimes even lateral/palm grasps.
- Object Shape Tolerance: Excellent for handling mixed or complex geometries.
Ideal For: Applications demanding flexibility and handling diverse parts.
- Bin Picking: Selecting different-shaped parts from a bin.
- Mixed SKU Handling: Warehousing/logistics with diverse products.
- Complex Assembly: Manipulating oddly shaped components.
- Agriculture: Harvesting fruits/vegetables of varying sizes.
- Laboratory Automation: Handling labware, tubes, instruments.
Pros: High adaptability, handles complex shapes, multiple grasp strategies.
Cons: More complex (mechanically and in programming), slower than parallel grippers, generally higher cost, lower maximum grip force.

Bonus Tech 1: The Marvel of Dexterity – Robotic Hands (Dexterous Hand)
The Gist: The pinnacle of robotic manipulation, mimicking the structure and dexterity of the human hand. Typically feature 4 or 5 fingers, multiple joints per finger (driven by numerous motors/tendons), sophisticated tactile sensors, and advanced AI control.
Key Features:
- High Degrees of Freedom (DoF): Allows for incredibly complex and nuanced movements.
- Advanced Sensing: Tactile, force-torque, and sometimes vision integrated for feedback.
- Unparalleled Dexterity: Can manipulate tools, perform intricate assembly, handle very delicate objects, conform to almost any shape.
Ideal For: Pushing the boundaries of what robots can manipulate.
- Complex Disassembly (e.g., Recycling): Taking apart intricate devices.
- Advanced Prosthetics: Providing near-natural hand function.
- Research (AI, Robotics): Studying manipulation, learning, AI control.
- Highly Specialized Assembly: Tasks requiring human-like dexterity (e.g., watchmaking, micro-surgery research).
- Dangerous Environment Handling: Where extreme dexterity is needed remotely.
Pros: Maximum flexibility and dexterity, human-like manipulation capabilities.
Cons: Extremely high cost, very complex programming/control, often slower, higher maintenance, power-hungry. Primarily in research and niche applications currently.
Bonus Tech 2: The Gentle Lifter – Electric Vacuum Cups (EVP – Electric Vacuum Pumps)
The Gist: While not a gripper in the mechanical sense, Electric Vacuum Pumps (EVPs) paired with suction cups are an essential gripping technology, especially for smooth, non-porous surfaces. They use an electric motor to generate vacuum, eliminating the need for compressed air.
Key Features:
- Non-Contact (Initial): Lifts without mechanically touching the object’s sides.
- Gentle Handling: Ideal for fragile, delicate, or highly finished surfaces.
- Large Surface Area Grip: Excellent for flat, thin, or large panels (glass, sheet metal, PCB, solar panels).
- Fast & Efficient: Especially for lightweight objects.
- Quiet & Clean: No hissing air lines, energy-efficient.
Ideal For: Handling large, flat, smooth, or fragile items.
- Sheet Metal & Glass Handling: Loading/unloading machines, transferring panels.
- Electronics: Moving PCBs, displays, silicon wafers.
- Packaging: Picking bags, pouches, cartons (with appropriate cups).
- Food & Pharma: Handling trays, containers, packaged goods.
- Logistics: Depalletizing boxes.
Pros: Gentle, fast for flat items, handles large surfaces, no mechanical marks, clean operation (EVPs).
Cons: Requires smooth, non-porous surface; sensitive to leaks/damage; struggles with porous, uneven, or very heavy items; requires a seal (cup) on the object. Note: EVPs replace noisy pneumatic vacuum generators but still require the physical suction cups.

Choosing Your Champion: It’s All About the Task!
There’s no single “best” gripper. The optimal choice flows directly from your specific application requirements:
- What are you gripping? (Size, weight, shape, material, surface, fragility)
- What do you need to do with it? (Pick, place, move, assemble, insert, orient, package, machine tend?)
- What are your environmental constraints? (Space, cleanliness, collaboration?)
- What are your performance needs? (Speed, precision, cycle time, force?)
- What’s your budget?
The Future is Gripping!
Electric gripper technology is advancing rapidly. We’re seeing smarter grippers with integrated vision and force sensing, lighter and stronger materials, more adaptive mechanisms, and increasingly sophisticated AI-driven control. This evolution is making robots more capable, versatile, and accessible than ever before, driving automation into new frontiers across every industry.
Ready to find the perfect “hand” for your robotic arm? Understanding these core technologies is the essential first step!
FAQs: Quick Gripper Guide
Q: Electric vs. Pneumatic Grippers? Which is better?
A: Electric wins on precision control, programmability (force/speed/position), cleaner operation (no air lines/oil), quieter, easier integration with sensors. Pneumatic can be cheaper upfront for very simple, high-force applications and are extremely fast for simple open/close. Electric is generally the future-forward choice.
Q: How important is grip force?
A: Crucial! It must be sufficient to hold the object securely against gravity and any process forces (like acceleration during robot movement) without damaging it. Too little = dropped part. Too much = crushed part. Electric grippers excel at precise force control.
Q: Can I change a gripper on a robot?
A: Absolutely! This is a key advantage. Using a standardized tool flange (like ISO 9409-1-50-4-M6 or others), robots can automatically swap between different grippers (or other tools like welders, cameras) using a tool changer, making one robot highly versatile. Manual changeovers are also common.
Q: Are collaborative grippers safe?
A: They are designed for safety in collaborative settings, incorporating features like force sensing, limited power, and pinch-free designs. Crucially, safety is a system property. The entire robot cell (robot arm speed/force, gripper, workpiece weight/sharpness, application, safety monitoring) must be risk-assessed and validated according to standards (like ISO/TS 15066) to ensure true safety. The gripper alone doesn’t guarantee it.
Q: When would I choose vacuum over a mechanical gripper?
A: Primarily when handling large, flat, smooth, fragile surfaces (like glass, sheet metal, PCBs, solar panels, packaged goods) where mechanical contact could cause damage or isn’t feasible. Also excellent for thin/bendable objects like bags or pouches.